DAIMU 301/331: Algorithm-Integrated High-Precision Attitude Sensing Modules
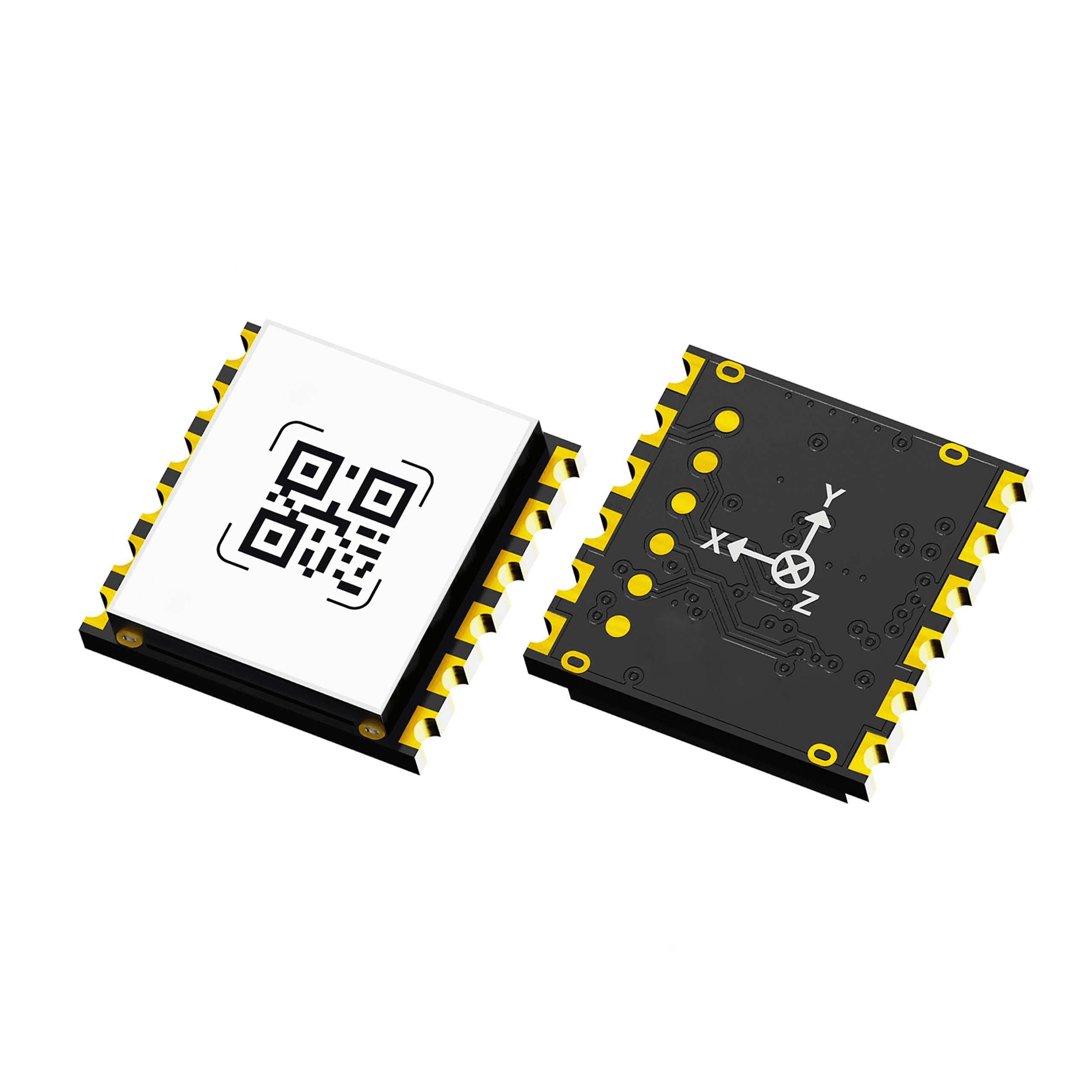
DAIMU301 and DAIMU331 are two miniature, high-performance industrial-grade Inertial Measurement Units (IMUs) designed for precise attitude sensing in harsh environments. Utilizing advanced stamp-hole gold plating technology, the body size is only 15.4×15.4×3.5mm and weighs as little as 1.4g, greatly saving space and simplifying integration. Built-in MCU and pre-integrated Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) algorithms allow direct output of high-precision three-axis attitude angles, achieving true plug-and-play functionality. Both products support stable operation across the full temperature range of -40℃ to 85℃, with 2000g shock resistance, 10g vibration resistance, and 100% magnetic shielding, making them suitable for dynamic scenarios such as drones, robotics, autonomous driving, and industrial control. The core difference lies in the range and precision of the accelerometer: DAIMU301 provides a large range of ±32g for high-impact applications, while DAIMU331 offers lower noise and higher static precision for scenarios requiring extreme stability.
2. Product Features
- Ultra-Compact & Highly Integrated: Stamp-hole gold plating process, ultra-small size of 15.4×15.4×3.5mm, and weight of only 1.4g; built-in MCU increases integration efficiency by 80%, supports UART/USB plug-and-play with extensible communication protocols.
- Dual High-Precision Sensors: Features a gyroscope with 3°/hr bias instability and angular random walk as low as 0.6°/√hr; accelerometer bias instability options of ±20mg (301) or ±10mg (331) to meet different precision requirements.
- Advanced Fusion Algorithms: Integrated complementary filter and Kalman filter (EKF/UKF) algorithms directly output Roll, Pitch, and Yaw angles, with Roll/Pitch accuracy up to 0.04° and Yaw accuracy of 0.2°.
- Harsh Environment Adaptability: Full temperature range compensation from -40℃ to 85℃ ensures minimal temperature drift; resists 2000g shock and 10g vibration, with 100% magnetic shielding to resist external magnetic interference.
- Military-Grade Reliability: Validated through four production stations including independent turntable calibration and temperature drift compensation; single-board test yield rate of 99.9%, with Mean Time Between Failures (MTBF) >1000 hours.
3. Detailed Technical Parameters
| Parameter |
DAIMU301 |
DAIMU331 |
| Gyroscope Bias Instability |
3.0°/hr |
3.0°/hr |
| Gyroscope Angular Random Walk |
0.8°/√hr |
0.6°/√hr |
| Gyroscope Measurement Range |
±2000°/s |
±2000°/s |
| Accelerometer Bias Instability |
±20mg |
±10mg |
| Accelerometer Velocity Random Walk |
0.12m/s/√hr |
0.09m/s/√hr |
| Accelerometer Measurement Range |
±32g |
±16g |
| Roll Accuracy |
0.05° |
0.04° |
| Pitch Accuracy |
0.05° |
0.04° |
| Yaw Accuracy |
0.2° |
0.2° |
| Temperature Range |
-40℃ ~ 85℃ (with temperature compensation) |
| Power Consumption |
120mW |
| Input Voltage |
3.3V ~ 16.0V |
| Hardware Interface |
UART / USB |
| Communication Protocol |
AT Command Set / Extensible Formats |
| Magnetic Shielding |
100% |
| Weight |
1.4g |
| Shock Resistance |
2000g |
| Vibration Resistance |
10g |
| Attitude Output Frequency |
1 ~ 200Hz |
4. Application Scenarios
- Drones & Flight Control: Provides precise attitude feedback to ensure stability and wind resistance during hovering and flight.
- Intelligent Robotics: Suitable for motion positioning and balance control of various mobile robots, including bipedal, wheeled, and biomimetic robots.
- VR/AR Motion Capture: Captures subtle human movements to achieve immersive interactive experiences.
- Autonomous Driving Perception: Provides real-time Roll, Pitch, and Yaw information for vehicles to assist in decision-making and control.
- Precision Control in Automation: Applied in agricultural and construction machinery for automatic leveling and path tracking.
- Industrial & Infrastructure Monitoring: Monitors micro-tilts and vibrations of structures such as bridges and towers.
- High-Precision Industrial Equipment: Used for antenna pointing, gimbal stabilization, and robotic joint control in precision adjustment scenarios.
 DAIMU 351New
DAIMU 351New DAIMU 303/333New
DAIMU 303/333New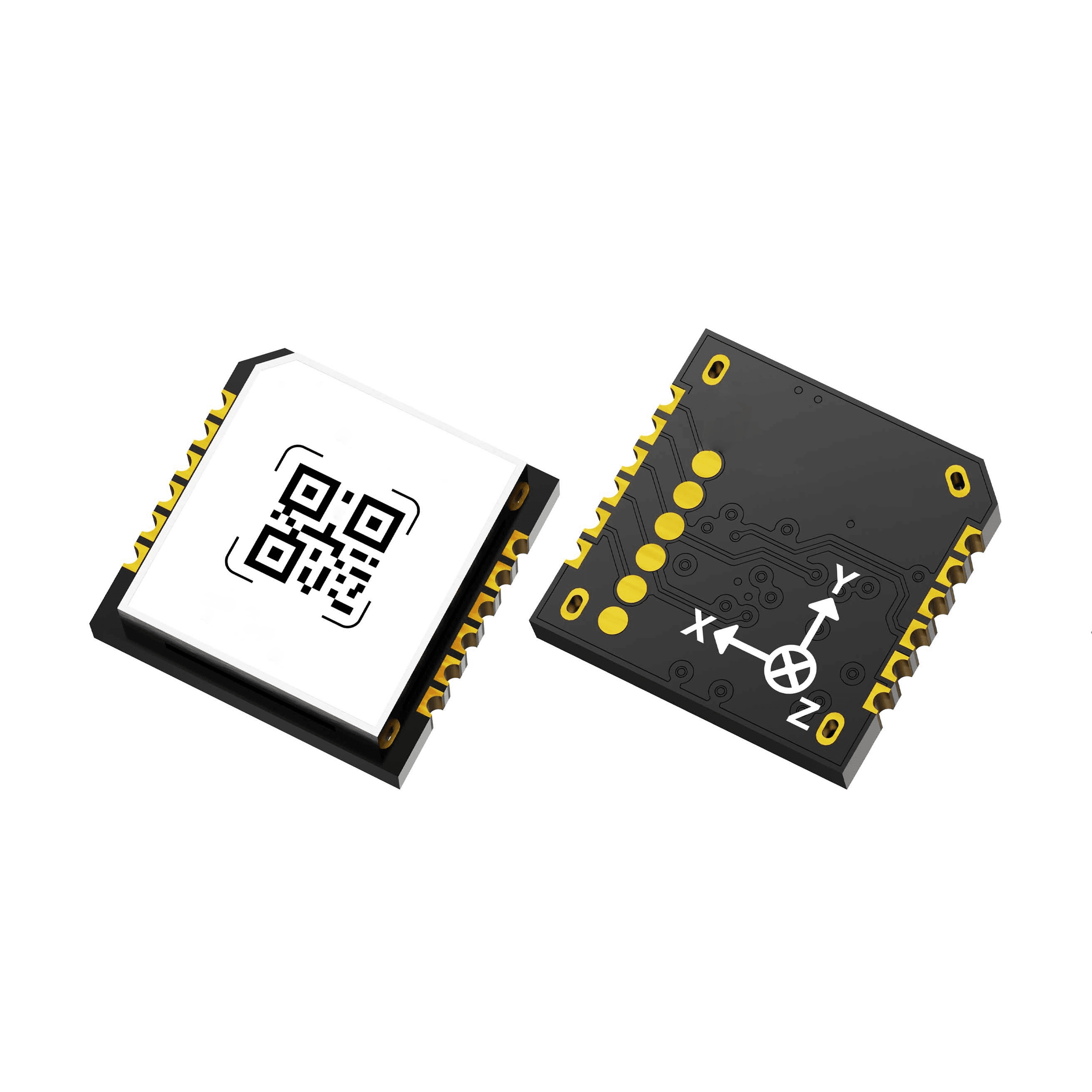 DAIMU101&103New
DAIMU101&103New